Heuristical motion planning
Implement (x,y,theta)-planning for a polygonal robot moving
with translation and rotations in 2D using one of:
- A*
- A tree (RRT)
- A probabilistic roadmap (PRM)
What to turn in
- Push your code in your github repo
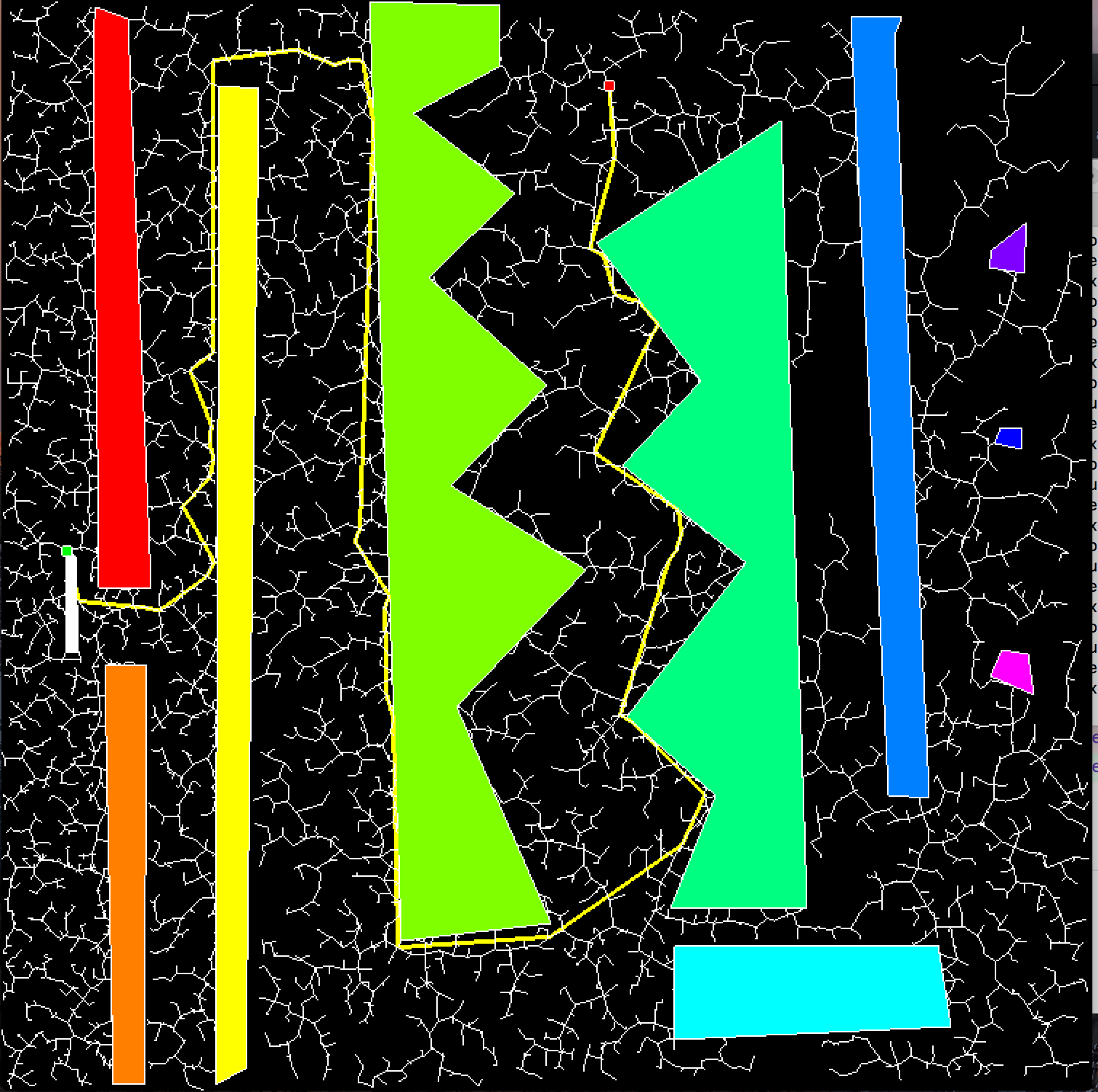
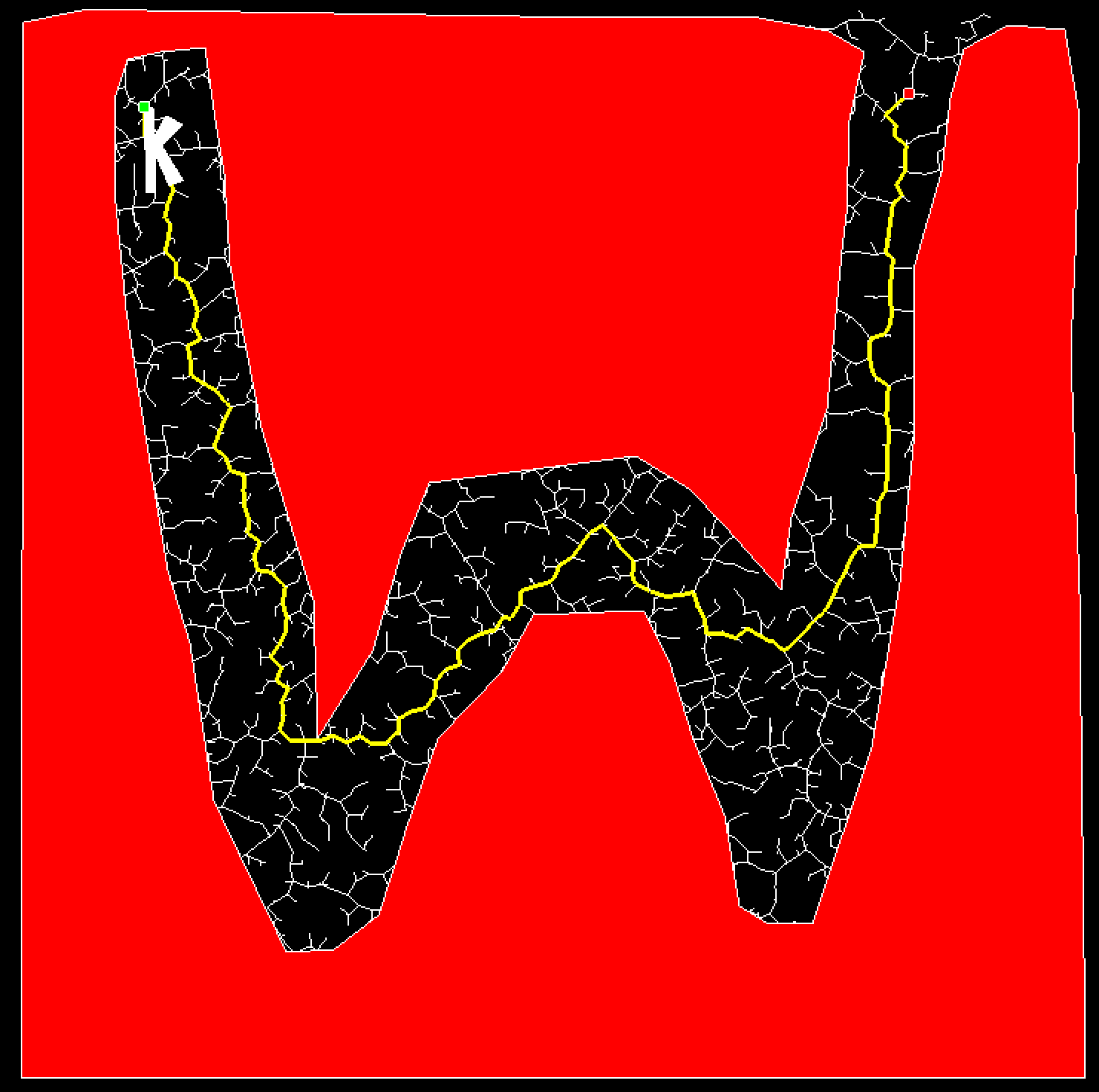
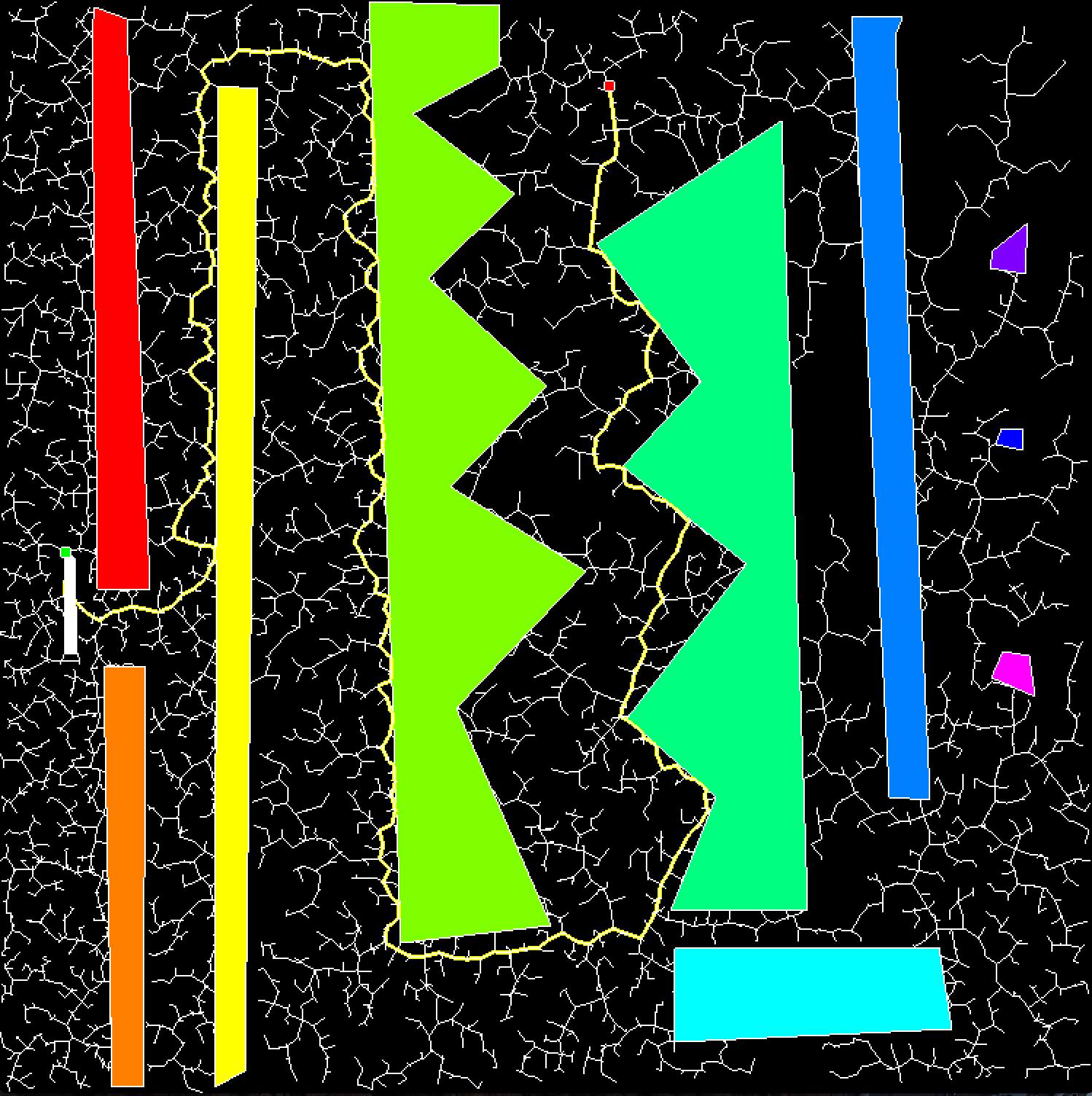
- A very brief report summarizing your project ---- how to run it,
what it can do, and include a few screenshots of the planner.
Demos
Enjoy!
 |
|
 |
|