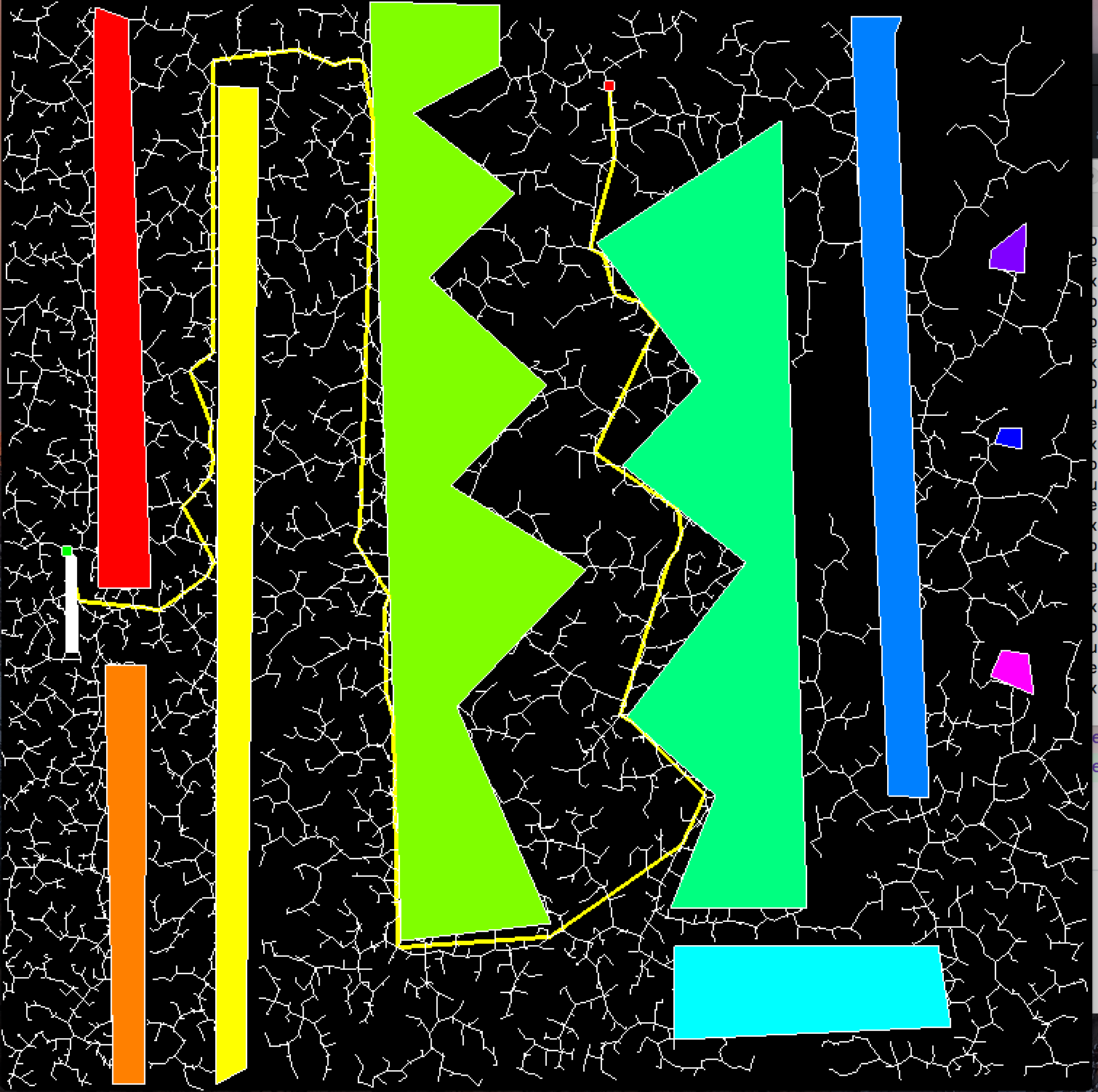
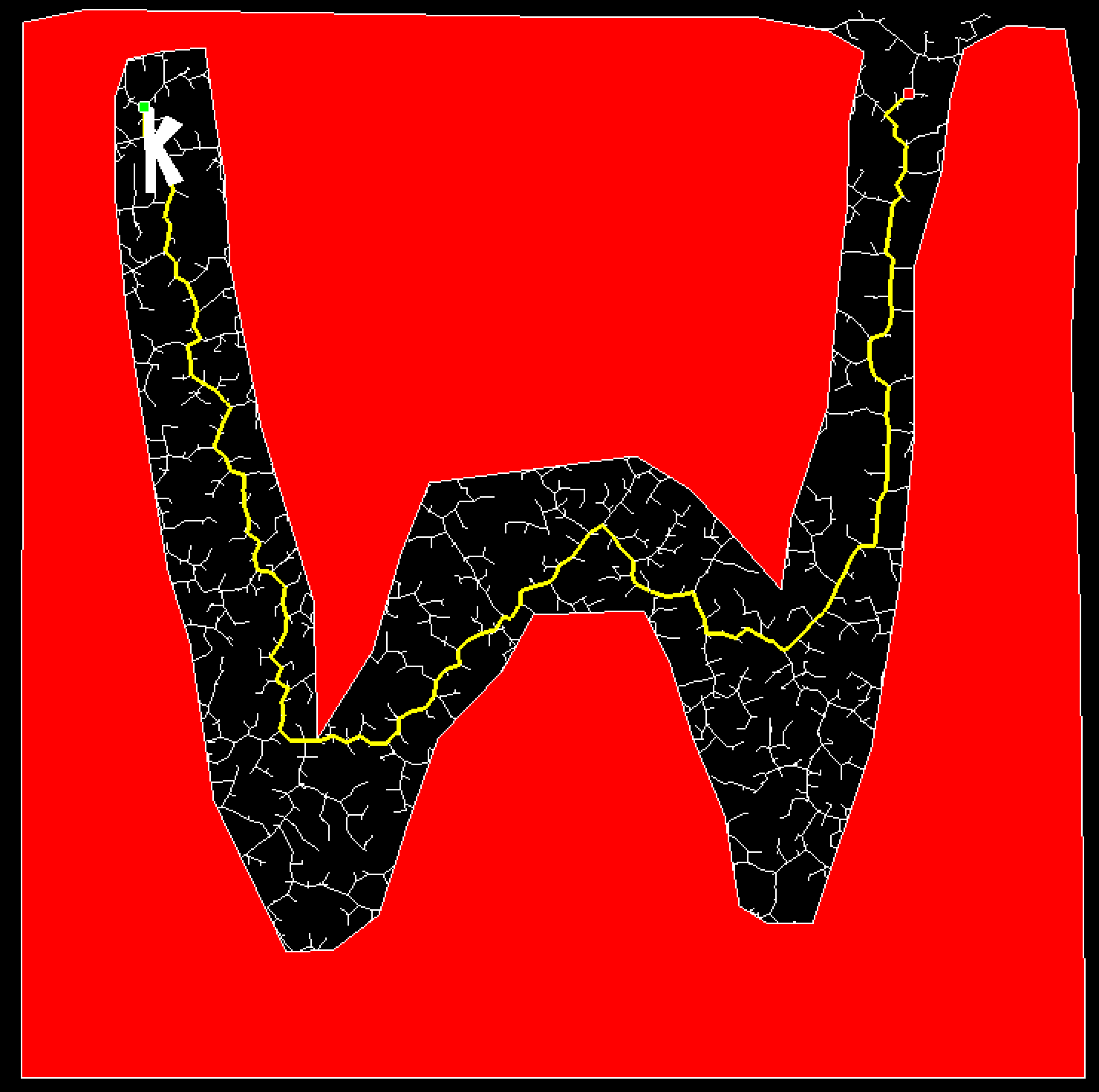
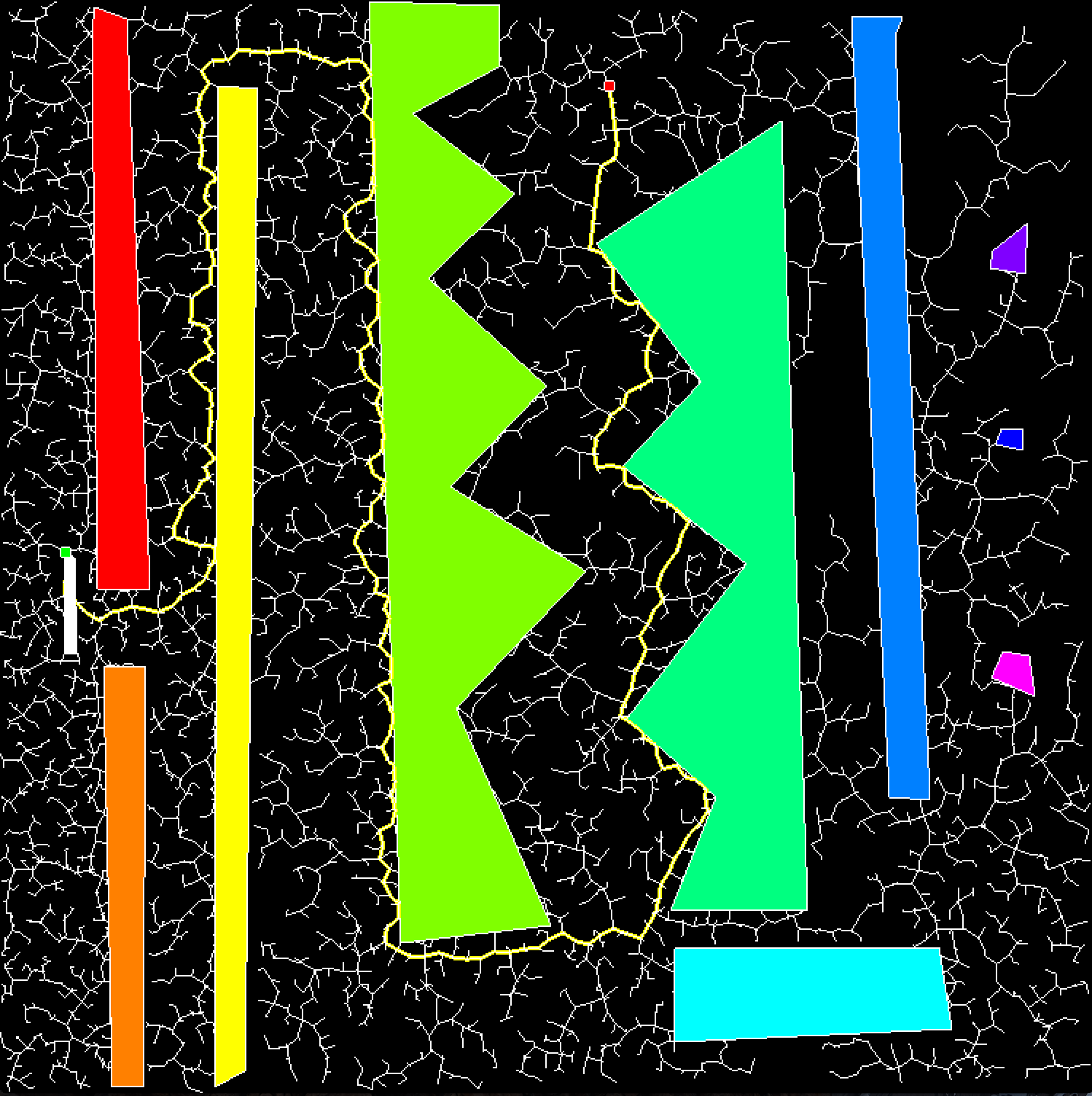
Heuristical motion planning
Implement (x,y,theta)-planning for a polygonal robot moving
with translation and rotation in 2D using one of:
- A*
- RRT
- A probabilistic roadmap (PRM)
What to turn in
- Push your code in your github repo
- Provide a README that describes (1) an overview of how your project works (2) how to run your code; and (3) the state of your code (examples of when it works, a list of known bugs). Basically what you want people to know about your code.
- Check into the repo a few screenshots of the planner and a movie if possible (you'll enjoy looking at it later!).
Demos
Program well and enjoy!
 |
|
 |
|