Project5: Working with LiDAR data
Lidar data
- lidar-data
- On dover you can find LIDAR data at: /mnt/research/gis/DATA/LIDAR/
Overview
The goal of this project is to work with Lidar data and take a shot
at classifying it, that is, identifying the ground, buildings and
vegetation.
Since understanding Lidar would be pretty hard, if not impossible,
without visualizing, I provided a skeleton that is able to read a
lidar file and visualize it based on return number and code; you will
find this skeleton in your GitHub repositories once you accept the
project. Your code will build on this skeleton so you probably want
to start by reading it and having an idea how it works. You can
ignore all the OpenGL stuff, and focus on how the data is filtered.
LiDAR data comes classified or partially classified from the data
provider.
The interface: Your code will take as input the name of a
lidar dataset, in txt form. For example,
[ltoma@dover:\~] ./lidarview zurich.txt
This will read the lidar point cloud zurich.txt, classify it and render it.
[Note: do we want to save the coded points? This may be necessary
to compare outputs. It's easy to add it once it's necessary, so for
now let's say its not needed]
Converting lidar .las/.laz files to .txt files
with las2txt
The standard format for Lidar data
is the las format (.las) and the compressed las
format (.laz). If you download lidar data from the web it it
will come as a .las or .laz file. For complete specification of the las format check out ASPRS las format.
For simplicity, we'll convert .las/.laz data to .txt
using las2txt tool from LAStools. LAStools is a suite of
tools for working with Lidar data by Martin Isenburg.
You can download LAStools from
its GitHub site;
or, if you prefer, you can download the LAStools library from Martin's rapidlasso site.
Once you download LAStools:
cd LAStools
make
cd bin
ls
Some of the modules in bin are licensed, some are free. Check out the
doc page for las2txt.
bin/las2txt -h
I ran it as
bin/las2txt -i data/zurich.las -o zurich.txt -parse xyznrc
This tells las2txt to write for each point: it's x,y,z, number of returns, return number, and code, in this order.
When you convert lidar data to txt it's important to use the
same -parse xyznrc command, because lidarview
expects to read the values in this order.
Note that LAStools comes with a folder with data (you can also find it here
on
Github), and you'll recognize zurich.las in the list.
Or, you could read .las/.laz files directly using LASlib
To avoid converting to .txt and work with files in .las/.laz format
directly you could use LAStools/LASlib, which is a free and open
source C++ API for reading and writing LIDAR data.
If you downloaded LAStools you already have it (or, you can find it on
GitHub here).
cd LAStools
cd LASlib
ls
cd example
The example folder has examples of how to read and write a .las file
and includes a Makefile.
In fact, glancing at the
example LAStools/LASlib/example/lasexample_simple_classification.cpp ,
you will see that it has code for how to create a min_z and a max_z
grid for the points, which is very similar to what you all did in
class; the difference is that the .las data has a header, which stores
minx and maxx, miny and maxy values. That's convenient! Perhaps using
text lidar data wasn's such a simplification afterall. [Note: next time
work with .las/.laz directly]
Outline
- Create a grid corresponding to the first returns: The
first task is to create a grid corresponding to the first return
points (and render it, see below).
If multiple points fall in one cell, the cell should store the
maximum value.
The resolution of the grid: Ideally it needs to match closely
the resolution of the lidar data. You don't want too many points
per cell, not too many empty cells. Since lidar data is usually
approx. 1m resolution, a good starting point is step=1
or step=2. The step shoud be either specified by
the user on the command line, or pre-defined at the top of the
code. Your function should print some info on how many points fall
in one cell, and how many empty cells, etc, so that the user can
infer whether step should be increased or decreased.
It seems that this grid should be created when the data is
loaded, and it should exist as a global along with the array of
lidar points.
- Render a grid with the color based on height and using a
triangle strip: The current code renders the lidar points by
iterating through the array and for each point:
glBegin(GL_POINT);
//convert (x,y,z) to [-1,1]x[-1,1]x[-1,1]
glVertex3f(...)
glEnd();
You'll need to add code to render a grid. We'll assume the grid is
diagonalized in the obvious way and you'll iterate through the points,
and render each triangle:
glBegin(GL_TRIANGLE);
//convert (x,y,z) to [-1,1]x[-1,1]x[-1,1]
//set color of this vertex
glVertex3f(...)
//convert (x,y,z) to [-1,1]x[-1,1]x[-1,1]
//set color of this vertex
glVertex3f(...)
//convert (x,y,z) to [-1,1]x[-1,1]x[-1,1]
//set color of this vertex
glVertex3f(...)
glEnd();
The color: Assign the color by height. You could divide the z-range in
a couple of buckets (3 or so), [z1,z2,z3,z4] and assign a
color to each bucket. When you want to render a point, you choose a
color based on which bucket its height falls in.
- Render a grid with hill shading: Same as above, but add
in hill shading. Hill shading is particularly relevant for
archaeology because its shows the relief. [Note: this is tentative
until someone gets it to work]
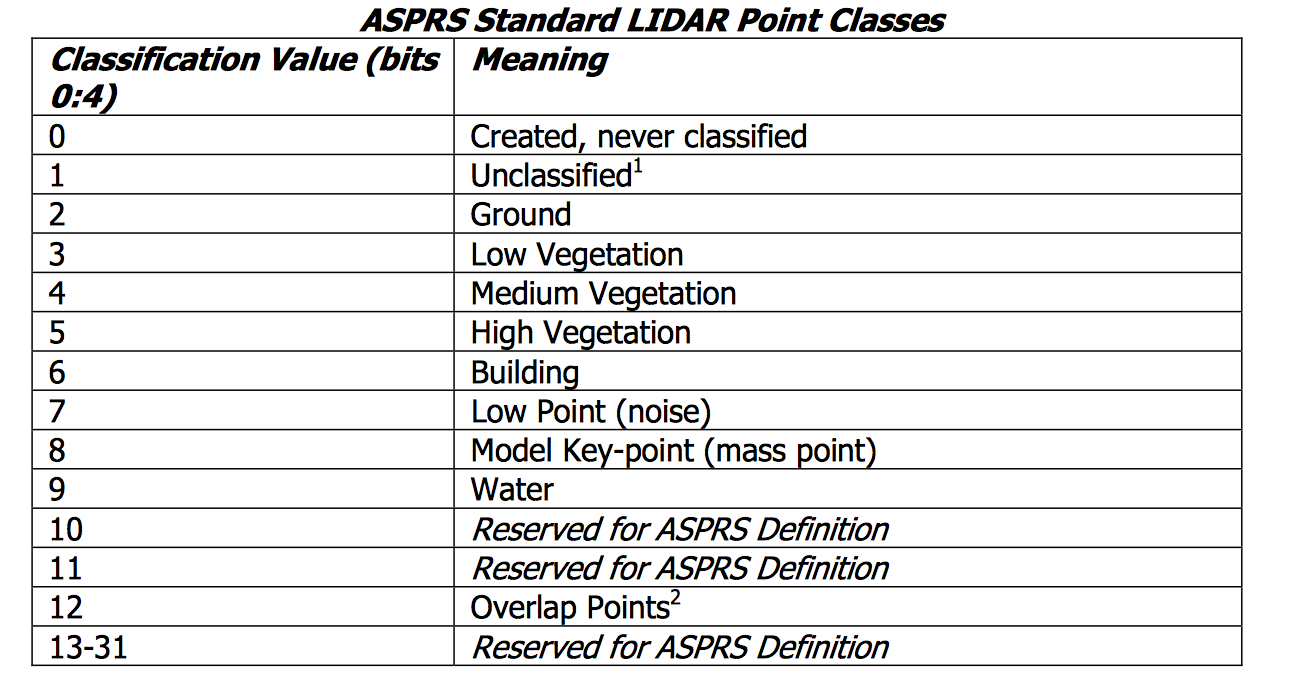
- Label the ground points: The three main types of
points that need to be distinguished in Lidar data are ground,
vegetation and building. Your task is to label the ground points.
To this end, the structure lidarpoint contains a
field mycode which is initialized to 0. After you
identify the ground, all ground points shoudl
have mycode=2 and the non-ground points should stay
at mycode=0 (or be labeled as vegetation or building
or noise). For e.g. if you decide that a point is noise, you
could set it as mycode=7.
The ASPRS standard codes are below:
Note that structure lidarpoint also includes a
field called code: this stores the code read from the
las file, and it is the classification code given by the data
provider. Sometimes lidar data comes unclassified (all codes
are 0), sometimes it's partially or fully classified by the
data provider; the qualiy of the classification can vary and
the data may need additional rounds of filtering with refined
methods. Anyways, if the codes are available, you can use them
for comparison with your code.
Note: Pressing 'c' cycles through the color maps, one of
which is by mycode. This makes it easy to test.
Idea: To find the ground points you will want to start
from the last returns: these are the points with
either a single return (return_number = 1 and nb_returns=1),
or points part of a multiple return, and have their
return_number equal to the nb_returns (return_number =
nb_returns). Denote the last return points by P'.
Take a look at a classified dataset (e.g. zurich) and see
how the last returns look, and how they are classified. Not
all last return points are ground: some are ground, some are
buildings, some are vegetation and some are noise. In other
words, you can;t just take all points in P' and label them as
ground. You will need to implement some smarter filtering
that filters out the non-ground points, i.e. the roof tops
and other noise (note that there isn't much vegetation in the
last return).
Some possible ideas:
- a point of min elevation must be ground, so you can
start the search (e.g.bfs) there
- use slope: a steep increase is unlikely to be natural earth, so it's non-ground
- use height difference: if the height difference between two points is too high, its unlikely that both are ground
- height threshold: (most) buildings are higher than x
meters (note: lidar measuremenst are in meters)
- erosion: traverse the set of points and set each
point to the minimum z-value in its neighborhood. Here we
think of the non-ground points as features, because their
z-value is larger than the z-value of the ground and they
"stand out". The effect of erosion is that features larger
that the window will disappear and in general features
will get eroded because their perimeter will be set to
ground. Several round of erosion will get rid of
buildings, but also of ground that may be high (like
natural hills).
- dilation: traverse the set of points and set each
point to the maximum z-value in its neighborhood.
- Erosion followed by dilation is commonly used in
computer vision to eliminate noise and
strengthen/emphasize the features.
Create a grid of last returns: No matter which ideas you
use, you will need to be able to find the neighbors of a
point. I suggest that you store the set P' (last returns)
in a grid. If more than one point falls in the same cell,
you could set the value of the cell to the lowest point; or
you could have each cell in the grid store, instead of a
value, an array of the points inside it.
- Create a grid corresponding to the ground points: Let
G be the set of points labeled as ground above. Create a grid
corresponding to G. The holes that correspond to point that are
not-ground (like under a roof ) are assigned a ground height by
interpolating from ground neighbors (e.g. nearest neighbor).
Add a key to keypress so when the user presses, this ground
grid is rendered.
- Paper:Write a paper/report that summarizes what you did:
- Your name(s) and github repo for this project
- Creating a grid for the first returns: what
spacing is default, and how it can be changed.
- Render a grid:what key to press, etc.
- Label ground points: Summarize your approach to
label the ground, and how it works. Run it on zurich.txt and
include pictures. How close can you get to the codes that come
with zurich.txt? Running it on more datasets is a plus,
and may actually be easier to detect ground when there are no
buildings. The approach does not to be perfect (it can't be), so
focus on what you learned.
- Create a grid corresponding to the ground points:
Sumarize your approach, and what one needs to do to see it
(what keys to press, etc).
Keep the paper concise, think of it as a report: its goal is to
summarize what you have done.
And finally, this is an open ended project, so feel free to explore
and take it to any direction you want to. If you have any suggestions,
let me know!
What to turn in
Push the code and the paper, also bring a hard copy of the paper to class.
Grading
Total 25 points [somewhat tentative, I'll need feedback].
- Grid of first returns
- Render grid
- Hill shading
- Label ground
- Ground grid
- Paper
Enjoy!